

 |
 |
 |

Der Neuanfang
Meine alte Anlage aus Jugendtagen stand seit vielen Jahren schon wieder aufgebaut im Keller, wurde aber selten bespielt. Immer wieder kam es auf den alten M-Gleisen zu Kontaktproblemen, eine Weiche schaltete nicht um oder der Zug wechselte einfach nicht die Richtung. Interessant war allerdings, dass man mittlerweile auf eBay sehr günstig, gut erhaltene Lokomotiven oder Schienenmaterial erwerben konnte. Damit erweiterten wir die Anlage um einen großen Schattenbahnhof. Der Spieltrieb verebbte aber immer wieder schnell.
Als mein Sohn zu Weihnachten von seinen Großeltern ein Märklin Starter-Set geschenkt bekam, habe ich mein altes Hobby als Modelleisenbahner wiederentdeckt. Der Zug ließ sich über die Digitalsteuerung präzise steuern, die Waggons kuppelten exakt, nur es gab viel zu wenig Möglichkeiten. Der Spieleffekt als „Teppichbahner“ war auch nicht derselbe wie auf der großen Anlage im Keller.
Ich beschaffte uns 2 Übergangsgleise von C-Gleis auf M-Gleis und wir konnten mit dem alten Schienenmaterial nun viel größere Strecken im Wohnzimmer aufbauen. Kurzerhand kam die Idee auf, die alte Anlage im Keller auf Digitalbetrieb umzustellen. Die Fahrten im Wohnzimmer zeigten aber schnell, dass die Probleme mit dem alten Gleismaterial geblieben wären.
Die Modulanlage
Nach dem Besuch einer Modellbahn-Ausstellung, wo wir zum ersten mal modular aufgebaute Anlagen sahen, ein paar interessanten Gesprächen und der anschließenden Internet-Recherche, entschieden wir uns zum Neubau einer Modulanlage mit dem neuen Märklin C-Gleismaterial. Es war schon interessant zu lesen, wie viele Normen es für Modulanlagen gab, so dass man nicht das Rad neu erfinden muss.
Für mich waren dies die interessantesten:
- MIST Hi Modul
- Modulnorm MIST55
- NORD-Modul
- Revier-Module
- FREMO H0 - Modulnorm
Wir entschieden uns für 2-gleisigen Streckenmodule, aufgebaut mit Märklin C-Gleisen und einem Gleisabstand von 77,5mm. Zum Start entwarf ich zunächst mit WinTrack eine Anlage in der klassischen Form eines Hundeknochens und teilte diese in Module auf. Diesen Aufbau halte ich erstmal für das Minimum, um eine bespielbare Anlage zu erhalten.
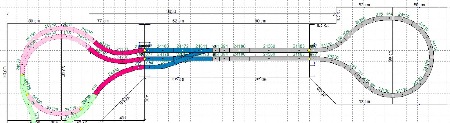
Der hellgrüne Teil ist eine geplante Erweiterung, damit die verdeckte Wendeschleife später auch als Ecke verwendet werden kann. Man kann ja nie wissen, wie es weiter geht. Die Stufe in der rechten Wendeschleife ist einer Eigenart unseres Dachbodens geschuldet. Es soll ja schließlich kein Platz verschwendet werden.
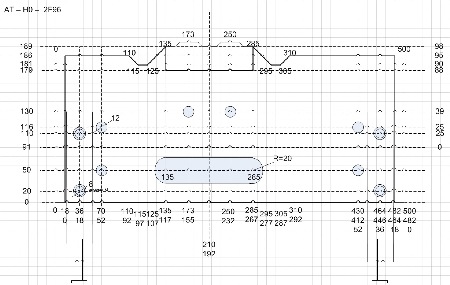
Der Modulkasten hat ein Grundmaß von 90x50cm. Streckenmodule verwenden dieses Grundmaß in Längsrichtung, Wendemodule sind aus 2 Modulkästen in Querrichtung aufgebaut, weichen aber durch die baulichen Gegebenheiten etwas vom Schema ab. Außerdem gefiel mir der rechte Winkel beim Übergang zu den Streckenmodulen nicht, so dass ich mich beim Übergang für eine Verbreiterung und einen 45°-Winkel entschied.
Dieses kompakte Format eignet sich wunderbar um aus dem Keller bis auf den Dachboden transportiert werden zu können. Auf dem Dachboden haben wir die Module auf niedrige Füße geschraubt und direkt vor den Drempel gestellt. So kann man den Raum immer noch begehen und die Anlage kann die Länge des Raums ausnutzen.
Das Material der Modulkästen besteht aus 18mm Birken-Multiplex und hat auf der Länge von 90cm zwei Querspanten unter der 10mm dicken Auflage aus Buchensperrholz. Nord- und Südgleis sind zwei separate Stromkreise und werden durch separate Booster angesteuert. Der Kabelbaum besteht aus 2,5qmm Querschnitten und wird über steckbare Lüsterklemmen von Modul zu Modul geführt.Das nördliche Gleis liegt exakt in der Mitte, das südliche Gleis 77,5mm davor. An den Stirnseiten verwende ich angepasste Profile aus der FREMO H0-Norm. Ich verwende bei meinen Planungen die Endprofile H0-B96, H0-E96 und H0-F96 und habe die Gräben und Böschungen entsprechend dem 2-gleisigen Aufbau entsprechend verschoben bzw. angepasst.
Lokomotiven-Umrüstung
Dann ging es an die Umrüstung der Lokomotiven. Als erstes habe ich eine EA800 von meiner alten Anlage mit einem ESU LokPilot V4.0 M4 Multiprotokoll-Dekoder ausgestattet. Da die Fahrergebnisse nicht zufriedenstellend waren, habe ich einen Märklin Hochleistungsmotor-Nachrüst-Set nachgerüstet. Jetzt klappt alles einwandfrei. Es folgte meine gute alte BR103. Da genug Platz vorhanden war, wollte ich auch mehr Funktionen integrieren und entschied mich die Stirnlampen durch 1 weiße und 2 rote LEDs auszutauschen. Diese sind so mit dem Decoder verbunden, dass das weiße Frontlicht als 3-Licht-Spitzensignal natürlich nur in Fahrtrichtung leuchtet und bei Bedarf als Fernlicht heller geschaltet werden kann. Auf der anderen Seite kann man optional die beiden unteren Lampen als rotes Rücklicht einschalten. Der Motorraum hat außerdem eine Dachbeleuchtung mit 2 gelben SMD-LEDs erhalten. Als drittes folgte die DHG500 aus dem Starter-Set meines Sohnes.
Die jeweiligen Umbauanleitungen habe ich auf http://maerklin-sammler-infos.de gefunden.
Bewährt hat sich bei mir für die Umbauten die Verwendung der ESU 21MTC Adapterplatine #51968, die man wunderbar in eine Märklin Decoder-Halteplatte #405040 einsetzen kann. Mit dem 21MTC-Adapter hat man dann auch gleich noch die Logikausgänge AUX3+AUX4 über Leistungstransistoren gepuffert für Schaltfunktionen zur Verfügung. Will man darüber weitere LEDs ansteuern, kann man hier auch gleich die Vorwiderstände in SMD-Form unterbringen. Ebenfalls möchte ich empfehlen, für die ersten Umbauversuche einen ganz einfachen DCC-Decoder zu verwenden. Mit diesem kann man zunächst alles austesten. Geht dabei etwas schief, weil man doch einen ungewollten Massekontakt hatte, schrottet man nur einen vergleichsweise kleinen Betrag. Ist aber alles OK, kann man durch einfaches Abziehen des Decoders von der Adapterplatine, diesen ohne Mehraufwand durch den gewünschten Decoder ersetzen.
Appetit kommt beim Essen und wenn dann die Programmierung der Decoder komplexer wird, ist die CV-Programmierung über die Multimaus, mit der ich begonnen hatte, keine Lösung mehr. Über kurz oder lang kommt man an dem zugehörigen ESU LokProgrammer nicht vorbei. Eine Investition, die sich sofort rechnet. Man kann am PC alles in Ruhe konfigurieren, die Konfigurationen der Loks archivieren und in einem Rutsch auf den Decoder übertragen. So macht Decoder-Programmierung Spaß!
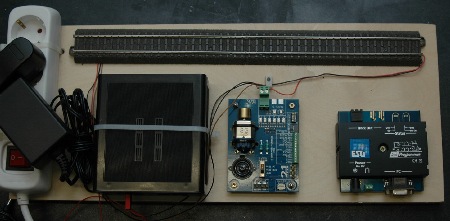
Ich habe mir für die Lok-Programmierung ein kurzes Brett mit ein paar Schienen fertig gemacht, auf dem ich den ESU LokProgrammer, den ESU Decoder-Prüfstand und einen Roco-Booster 10764 untergebracht habe. Dieses kann ich problemlos am PC nutzen und bin unabhängig von der Anlage.
Digitalsteuerung
Zur Steuerung verwenden wir den offenen DCC-Standard. Ziel ist es, dass später ein Automatik-Betrieb mit RocRail implementiert ist, der Züge nach Fahrplan steuert und wir als Spieler mit handgesteuerten Zügen dazwischen fahren und rangieren können.
Zum Einstieg habe ich zunächst 2 einfache Roco-Verstärker 10764 mit Multimäusen aus Startersets bei eBay erstanden. Diese gibt es nach Weihnachten zu Hauf im Angebot und sind günstig zu erlangen.
Zur Realisierung eines Automatik-Betriebes benötigte ich ein Computer-Interface. Hier gibt es zahlreiche Lösungen im Netz, die mich aber alle nicht direkt ansprachen. Häufig waren die Lösungen alt oder der Bastel-Charakter war mir zu groß. Dann fand ich auf einmal die Seite von Philipp Gahtow, der basierend auf einem Arduino Mega eine Z21-kompatible Digitalzentrale mit ausgeklügelter Software realisiert hatte. Diese Lösung erfüllte auf einen Schlag alle meine Anforderungen. Für den manuellen Betrieb können wir weiterhin die Multimäuse am X-Bus anschließen oder alternativ über das WiFi-Interface mit der Z21-App die Züge über iPhone & iPad steuern. Die Schaltung wird von RocRail als Z21-Zentrale erkannt und kann über S88N-kompatible Rückmelder die Belegtmeldungen an den Steuerrechner weitergeben. Damit realisieren wir dann den Automatikbetrieb.
Philipps Empfehlung folgend bestellte ich alle benötigten Bauteile bei AliExpress, was hervorragend klappte. Ich entwarf ein Layout für die Mega-Version in Fritzing und baute die Schaltung auf.
{kind=link}

Hier das Fritzing-Layout:
myZ21-v2.2.fzz |
Einmessen der Höchstgeschwindigkeit
Die Wartezeit von 4-5 Wochen auf die Bauteile überbrücken wir damit, dass wir uns um die richtige Einstellung für die Höchstgeschwindigkeit der Lokomotiven kümmerten. Es sollte schon ein bisschen originalgetreuer werden, als auf meiner alten Anlage, wo auch schon mal problemlos eine Rangierlokomotive einen Schnellzug überholen konnte.
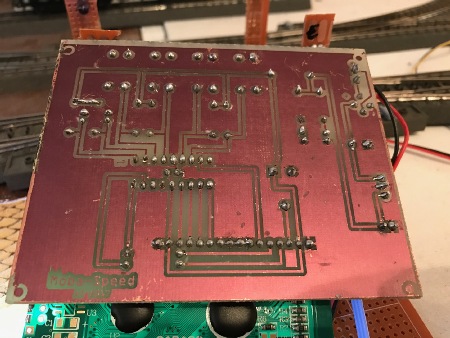
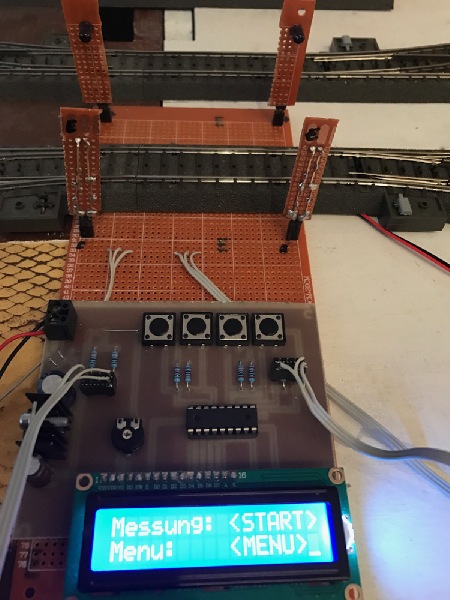
In einem Verein zeigte man mir einen Messwagen, der aus einem Fahrradtacho und einem Permanentmagneten an einer Achse zusammengesetzt war. Die maßstabsgerechte Anzeige konnte durch die Einstellung des Raddurchmessers am Tacho erreicht werden. Im Miniatur-Wunderland wird eine Messstrecke eingesetzt, die die Geschwindigkeit der Züge messen kann, ohne daran Umbauten vornehmen zu müssen. Im Internet fand ich das Selbstbau-Projekt MoBa-Speed, welches die Geschwindigkeit eines Zuges zwischen 2 Lichtschranken misst und durch einen Mikrocontroller maßstabsgerecht auf einem LC-Display anzeigt.
Diese Lösung fand ich am interessantesten und entschloss mich zum Nachbau. Mit Fritzing entwarf ich eine Schaltung auf der dann auch gleich ein Spannungsregler, die Bedientaster und die Vorwiderstände für die Infrarot-LEDs untergebracht waren. In der Software hatte sich ein Fehler eingeschlichen, der es in der Spurweite H0 unmöglich machte, diese als den gewünschten Maßstab im Speicher zu hinterlegen. Des Weiteren gefiel mir nicht, dass man nach einer Messung den neuen Messvorgang manuell starten musste. In meiner Version wird die Geschwindigkeit nun ein paar Sekunden angezeigt, danach startet die nächste Messung automatisch.
Hier sind die erstellten bzw. modifizierten Files:
· <MobaSpeed.ftz>
· <MobaSpeed.asm>
Die
Einstellung der Geschwindigkeiten der Lokomotiven war danach ein
Kinderspiel. Höchstgeschwindigkeit des Originals recherchieren und die
Lok mit Vollgas ein paar Runden durch die Lichtschranken drehen lassen.
Danach die CV-Werte anpassen und solange wiederholen, bis die
gewünschten Höchstgeschwindigkeiten passen.
Leider erforderte der
Aufbau der Blitzstrecke auch die Programmierung eines PIC18F1220, für
den man erstmal ein Programmiergerät benötigte. Dieses fand ich im
PIC-Brenner8 auf http://sprut.de – der Referenzseite für derartige Schaltungen im Internet!
Dieser
Brenner benötigt aber selbst auch wieder einen Mikrocontroller vom Typ
PIC18F2550. Etwas versteckt gibt "sprut" selber den Hinweis auf seiner
Homepage, wie man diesen Deadlock auflösen kann. Man verwendet einfach
den Arduino als PIC-Programmer. Eine Anleitung hierzu findet man auf der
Homepage von "High Spark".
Der
dort bereitgestellte Sketch hat bei mir aber nicht reibungslos
funktioniert. Der Microcontroller mit dem programmierten Bootloader tat
im PIC-Brenner keinen Mucks und ich hatte zunächst einen nicht
schwingenden Quarz im Verdacht. Ein bekanntes Problem bei diesen
Schaltungen. Erst als ich auf die Idee kam, den Sketch zu erweitern und
den Code erneut auszulesen, stellte ich fest, dass die
Konfigurationsvariablen nicht gesetzt waren. Eine Analyse des
Original-Sketches zeigte dann, dass die Reihenfolge: Config setzen, dann
den Speicher löschen, auch die Konfiguration zerstört hat.
Ein
simpler Austausch der Reihenfolge brachte dann das gewünschte Ergebnis.
Beim anschließenden Auslesen wurden keine Änderungen mehr festgestellt
und der PIC funktionierte im Brenner wie in er Dokumentation
beschrieben.
Hier ist der modifizierte Arduino Sketch für das Laden des Bootloaders:
· <Sketch>
S88-Rückmelder
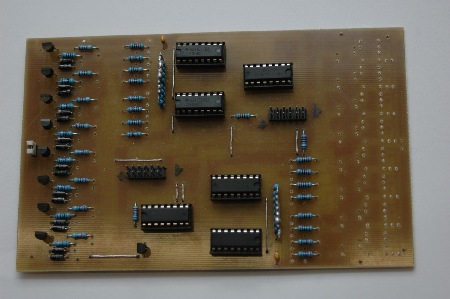
Um Erfahrung mit den S88-Rückmeldern zu sammeln, entschied ich mich zunächst gegen die zahlreichen Angebote mit hochintegrierten Schaltungen auf SMD-Basis.
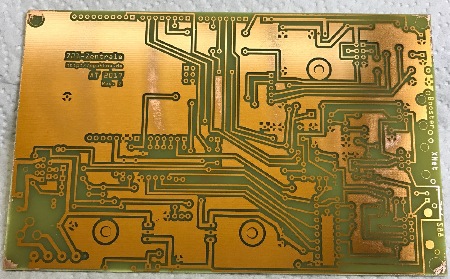
Bei Heise fand ich eine uralte Bauanleitung für einen S88-Rückmelder mit diskreten Bauteilen. Diese kann sowohl als Stromsensor als auch als Massesensor verwendet werden. Ich übertrug das Layout in Fritzing und baute die Schaltung nach.
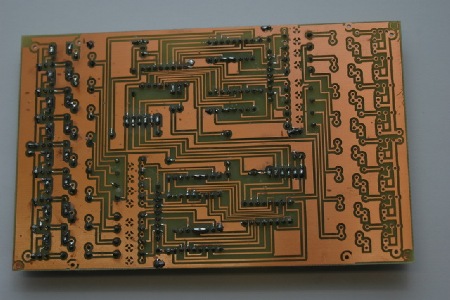
Hier das Fritzing-Layout:
RM16-v1.1.fzz |
